[ 481,653 keer bekeken / views ]
 Slimme Meter P1 HUB
Slimme Meter P1 HUB















Build Your Own Drum Machine

All you want to know about The Groovebox Project
Continue Reading …
Universal Timer Project

Software that turns TFT LCD DISPLAY with the Piggy Back Board into an universal timer.
Continue Reading …
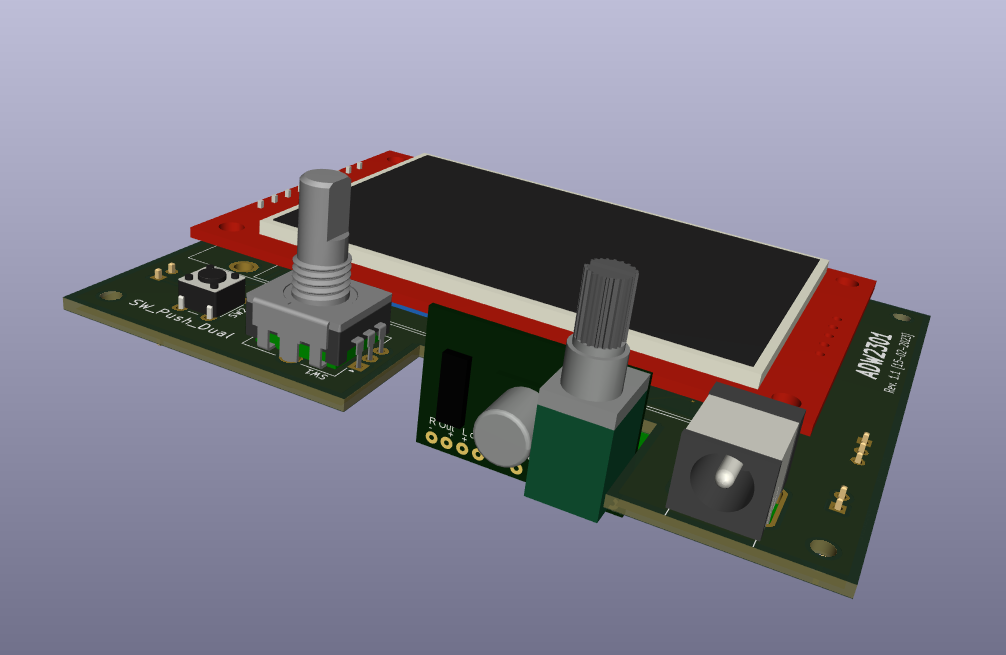
A Piggy Back board for the TFT LCD Display with EC11
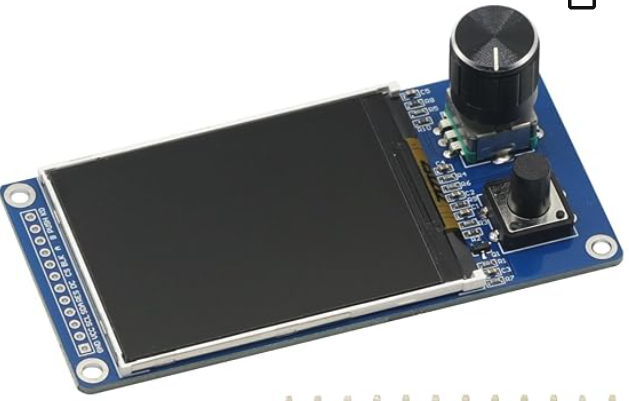
Inspired by the “Cheap Yellow Display” board that I used in an earlier project, I thought it would be interesting to design a piggy-back board for this display so it can be used in the same easy way as the Cheap Yellow Display.
Continue Reading …
Modifying the Reolink Chime (v2)

Can you use your Reolink Video Doorbell with your existing mechanical doorbell’s?
Yes you can!
Continue Reading …
Desktop Luchtkwaliteit Meter

Dit is derde en laatste post in het kader van het meten van de luchtkwaliteit. Dit keer beschrijf ik een meter die in je woonkamer, slaapkamer, keuken of kantoor kunt neerzetten en die constant de luchtkwaliteit van de ruimte meet en op een scherm zichtbaar maakt.
Continue Reading …
Soft Power Latch Circuit
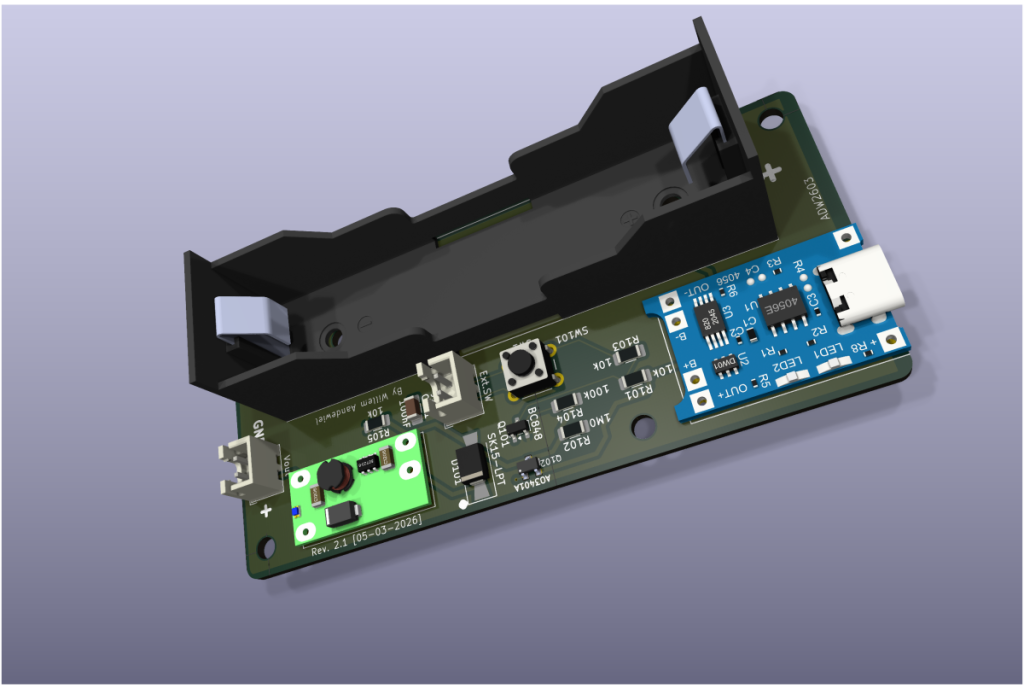
With this design, you create an extremely efficient circuit that allows you to power a project with a single push-button and turn it off again using that same button, while consuming virtually no current in the “off” state. Ideal for battery-powered projects!
Continue Reading …
Vakverdeling voor lades en dozen
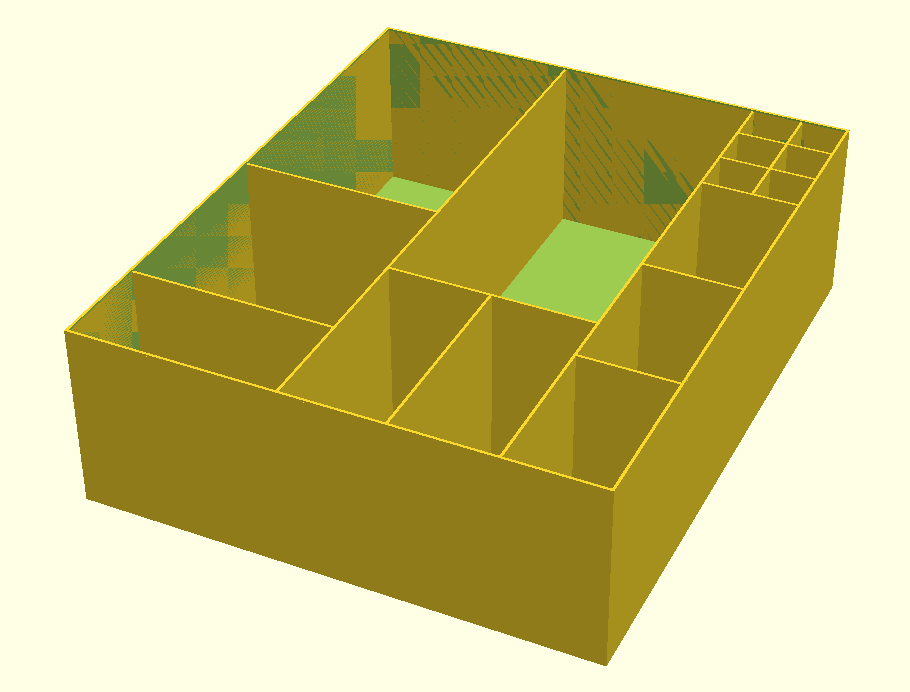
In deze post presenteer ik twee (python) programma’s die dit eenvoudig(er) maken.
Continue Reading …
Draagbare Fijnstofmeter
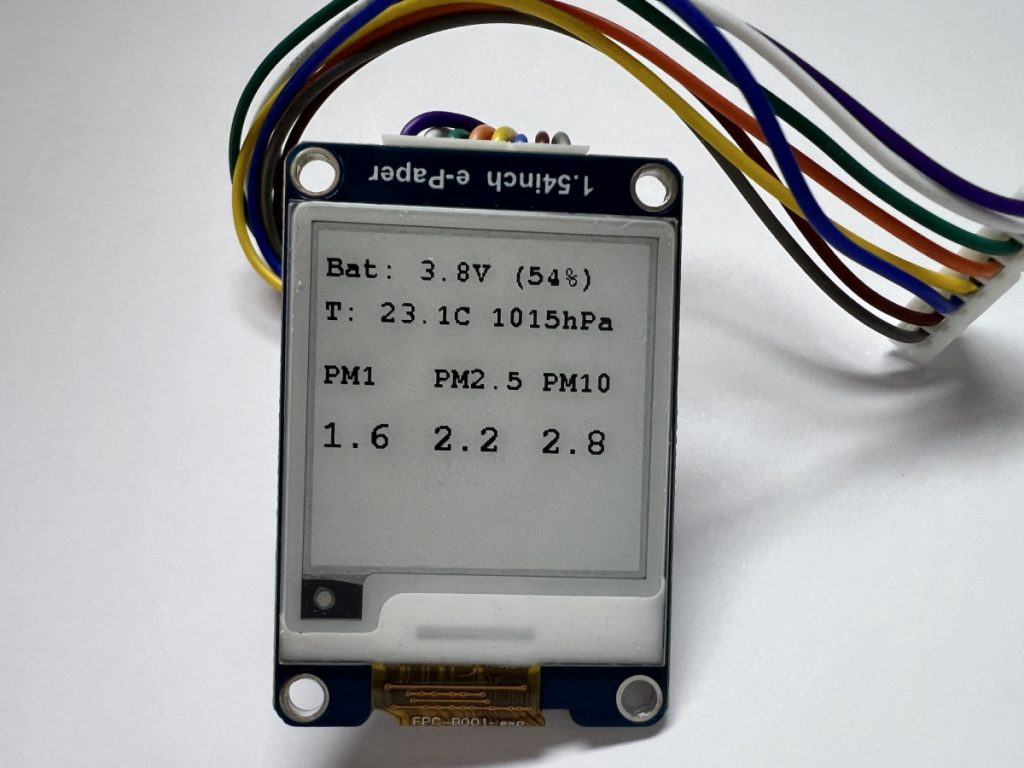
Dit ontwerp bouwt voort op de eerder ontwikkelde stofdeeltjesmeter (Particulate Matter meter).
In deze post maak ik een draagbare fijnstof meter die overal gebruikt kan worden om de concentratie fijnstof te meten.
Continue Reading …
Stofdeeltjes (Particulate Matter) meter
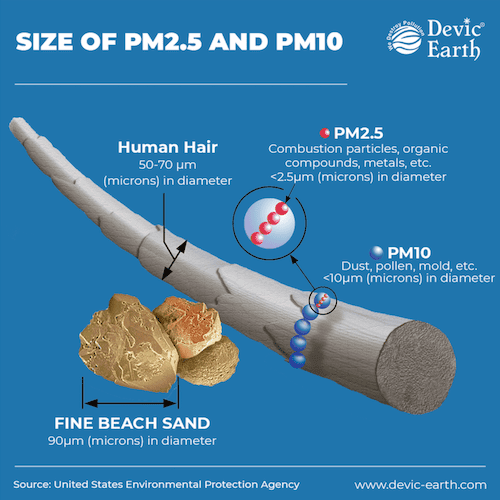
In deze post beschrijf ik hoe je eenvoudig een stofdeeltjes (particulate matter) sensor kunt maken.
Continue Reading …
Pulse Catcher voor gasmeter
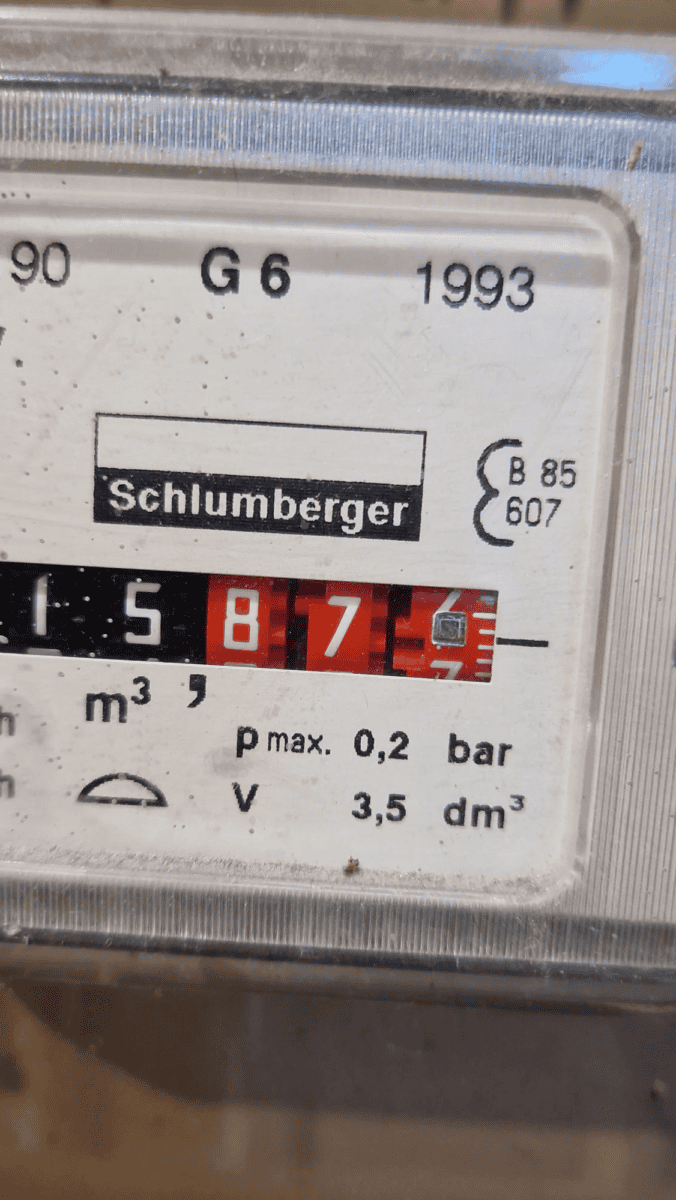
Hoe kun je een Pulse Catcher maken om het gasverbruik te meten?
Er zijn gebruikers van de verschillende DSMR-loggers die ik heb ontworpen die een gasmeter hebben die niet op de Slimme Meter is aangesloten.
De oplossing is een apparaatje dat de pulsen van de gasmeter opvangt en doorstuurt naar de DSMR-logger.
Continue Reading …
Hoe bibliotheken het leven makkelijker maken
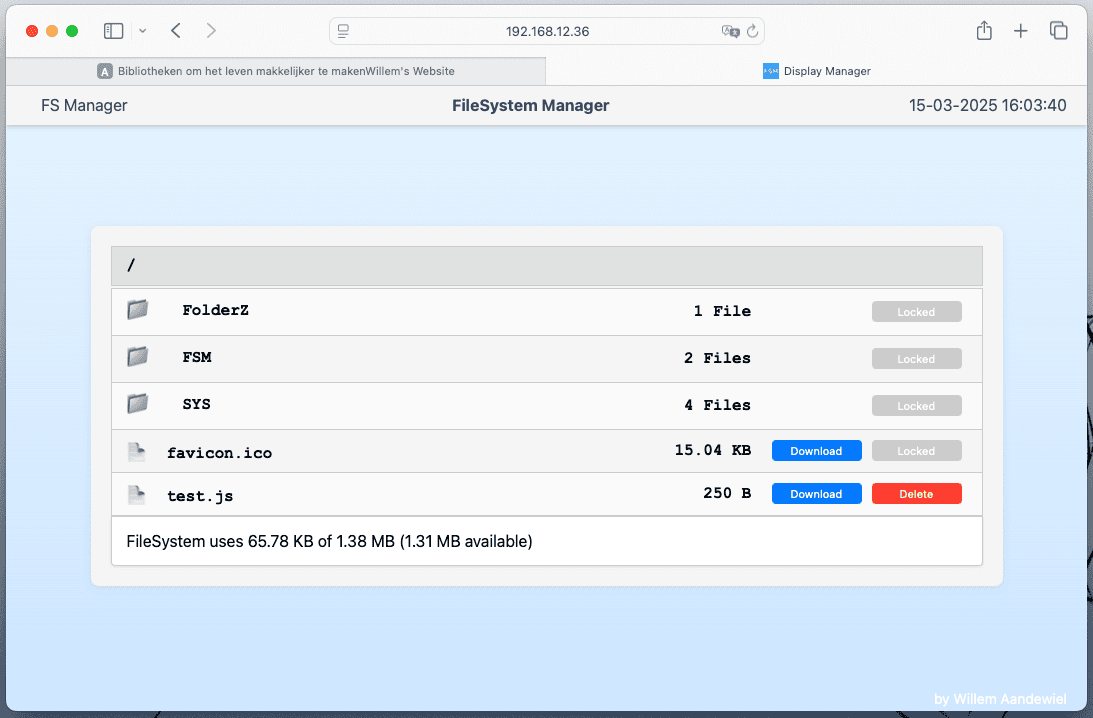
In een serie van drie posts beschrijf ik het gebruik van een door mij geschreven bibliotheek.
Deel 1: Networking
Deel 2: Single Page Application Manager
Deel 3: Filesystem Manager
Continue Reading …
Slimme Meter Uitlezer – Nieuwe Functionaliteit
In deze post beschrijf ik nieuwe functionaliteit van de DSMRlogger32.
Continue Reading …
Overstappen naar PlatformIO (part 1)
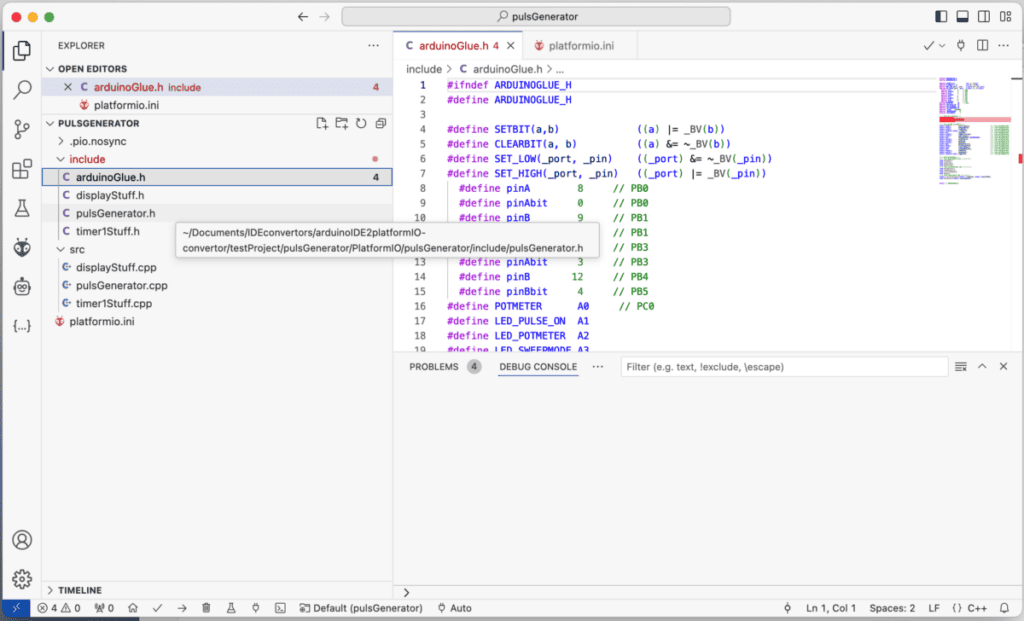
In deze post beschrijf ik een programma waarmee eenvoudig een Arduino IDE project omgezet kan worden naar PlatformIO
Continue Reading …
Overstappen naar PlatformIO (part 2)
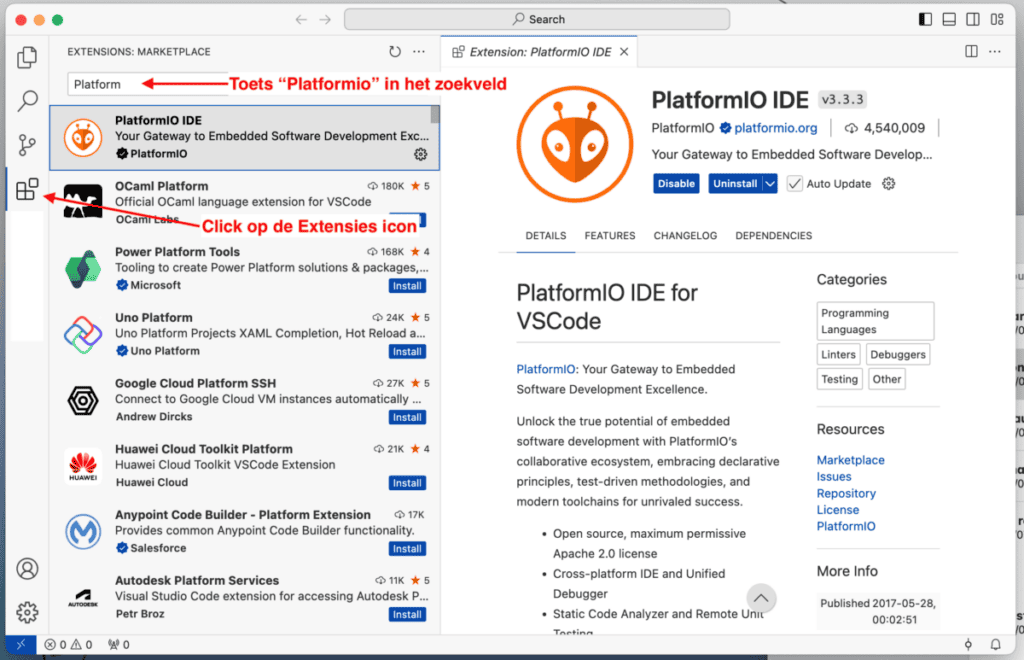
In deze post geef ik een korte introductie van de PlatformIO IDE
Continue Reading …
Universal Prototyping Board
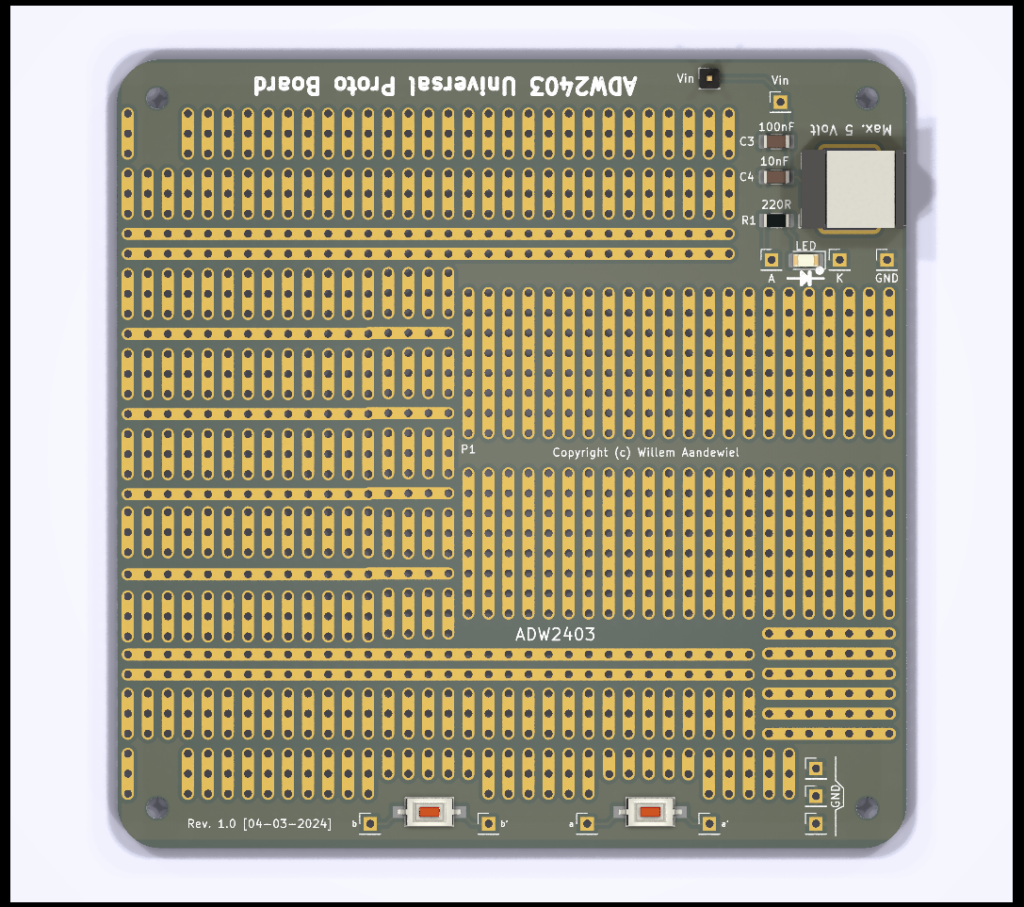
In the intricate world of microcontroller unit (MCU) development, versatility is often sacrificed for specificity. However, imagine a single solution that transcends these limitations – the Universal Prototyping Board.
Continue Reading ..
Virtuele P1 Kabel
Deze post beschrijft hoe je een “Virtuele P1 Kabel” kunt maken.
Continue Reading …
RGB LED strip controller

This project describes the design of a RGB LED strip controller board with an ESP32 processor board (ESP-DevKitC).
Continue Reading …
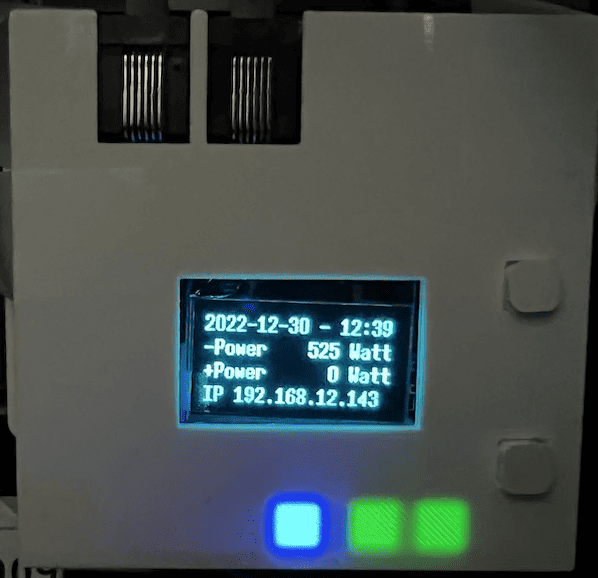
Crisis? What crisis? (nieuwe Slimme Meter reader)
Met een energiecrises die iedereen raakt wordt het “in de gaten houden” van je energie verbruik steeds belangrijker. Daarom is het, na bijna vier jaar, hoog tijd om een nieuwe DSMR-logger te ontwikkelen.
Continue Reading …
Porting Tasmota naar de DSMR-logger32
Omdat ik (Davy) thuis reeds heel wat esp8266 modules draaien heb met Tasmota, wenste ik de DSMR-logger32 ook te flashen met Tasmota.
Continue Reading …
Switch to PlatformIO (part 1)
In this post I describe a program that can be used to convert an Arduino IDE project to PlatformIO
Continue Reading
MIDI Drum Machine
Een MIDI Drum Machine gebaseerd op een project van Peter Balch. Het is een één-op-één kopie van wat Peter Balch heeft gemaakt met alleen een door mij ontwikkelde PCB. Het is een leuke puzzel om alle onderdelen op een zo klein mogelijke printplaat te groeperen en dan ook nog zodanig dat je ze ook nog kunt solderen.
Continue Reading
Experimenteren met Micro Controllers
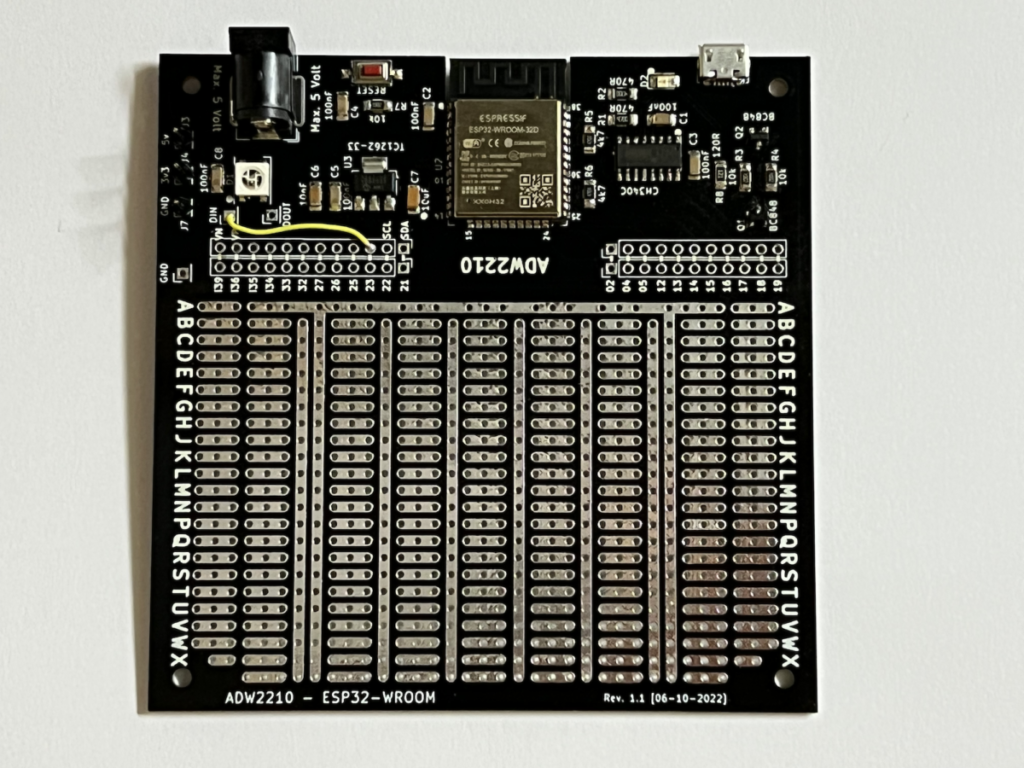
Ik heb twee nieuwe universeel toepasbare experimenteer printplaten ontworpen. Eén voor de ESP32 WROOM module en één voor de ESP32WROVER module. Op veler verzoek en voor het gebruiksgemak hebben beide bordjes een CH340C aan boord waarmee je de ESP32 eenvoudig via de USB poort kunt flashen. Als extra hebben ze ook een NeoPixel aan boord (gewoon, omdat het kán)..
Continue Reading ..
Zwerfafval detectie bij ondergrondse containers

Deze post beschrijft de ontwikkeling van een Zwerfafval Detectie en Meldingen Systeem voor ondergrondse containers .. Continue Reading ..
Spotify Muziekspeler met Intuïtieve bediening
In deze post presenteer ik een project waarmee op een ándere manier muziek afgespeeld kan worden
Continue Reading ..
External Watchdog Timer
In this post I describe how to make an External Watchdog Timer to monitor, for instance, an ESP8266 or ESP32.
Continue Reading ..
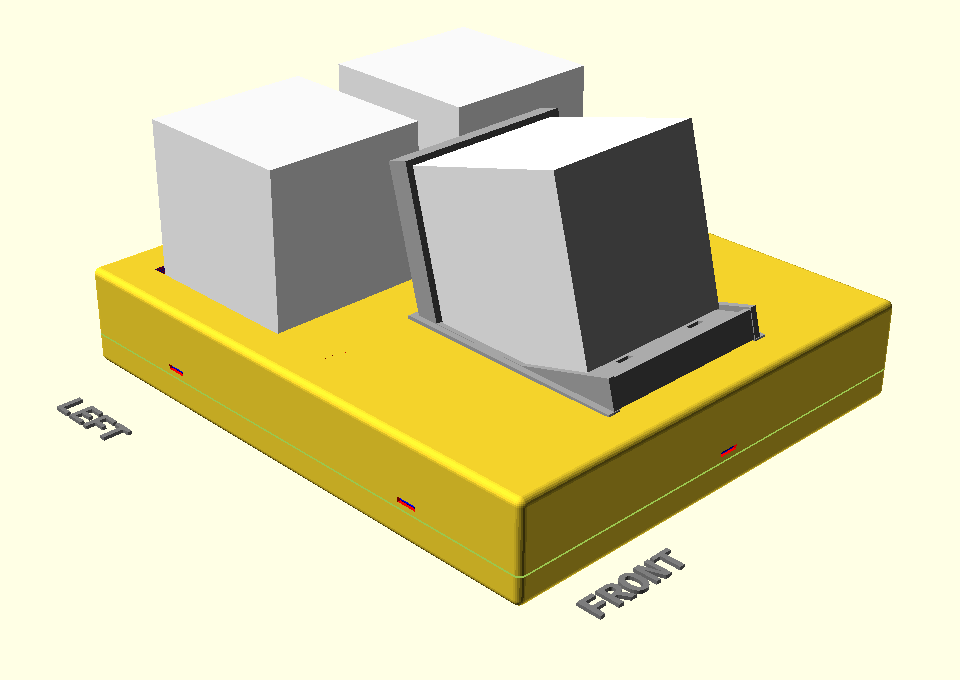
Nog een geparametriseerde projectbox generator (YAPP)

Yet Another Parametric Projectbox Generator
In deze post leg ik uit wat de uitgangspunten van deze YAPP generator zijn en hoe je hem kunt gebruiken om mooie projectboxen te 3D-printen!
Continue Reading ..
AT tester (Challenge/Response)
For a project I’m working on with Jelmer (JDJelectronics) we have to communicate with a SIMCOM GPRS modem.
Continue Reading ..
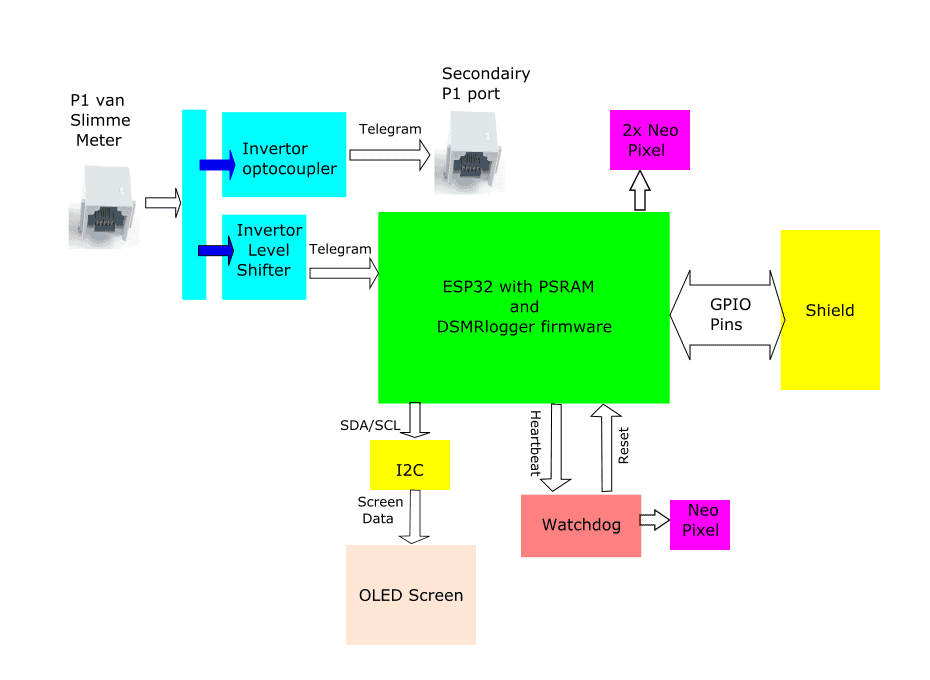
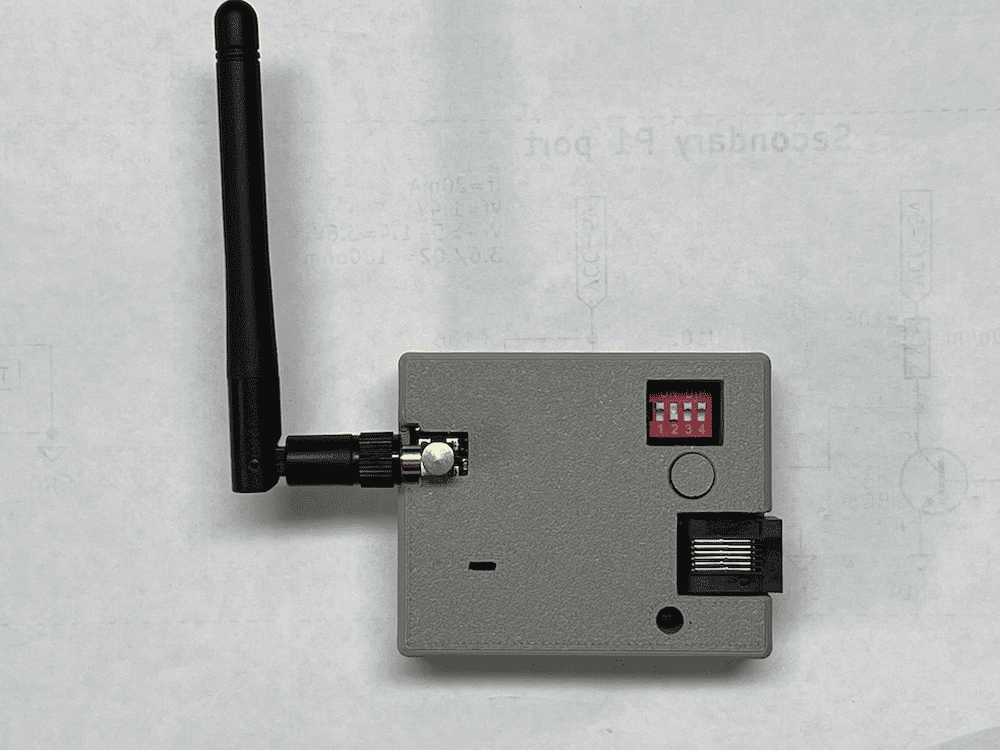
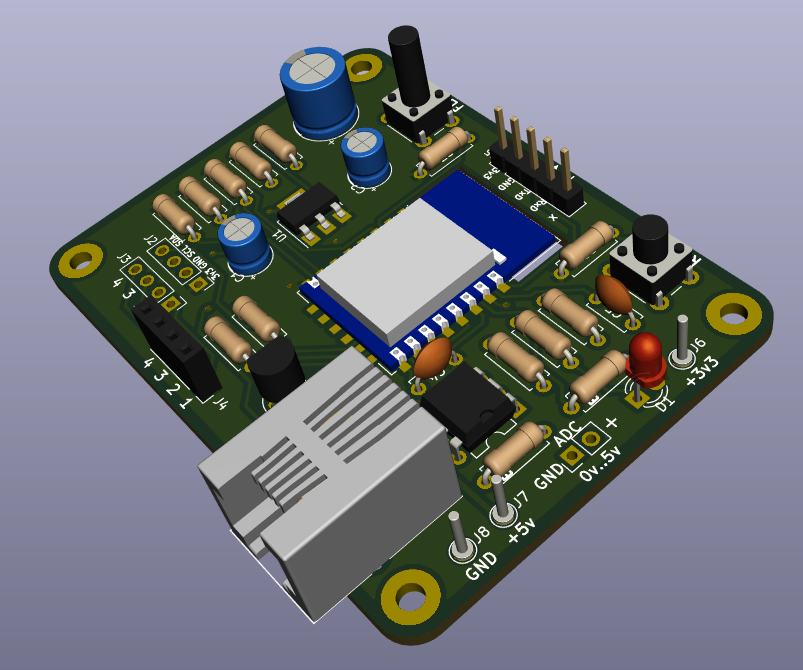
P1 Poort Extender (HUB)
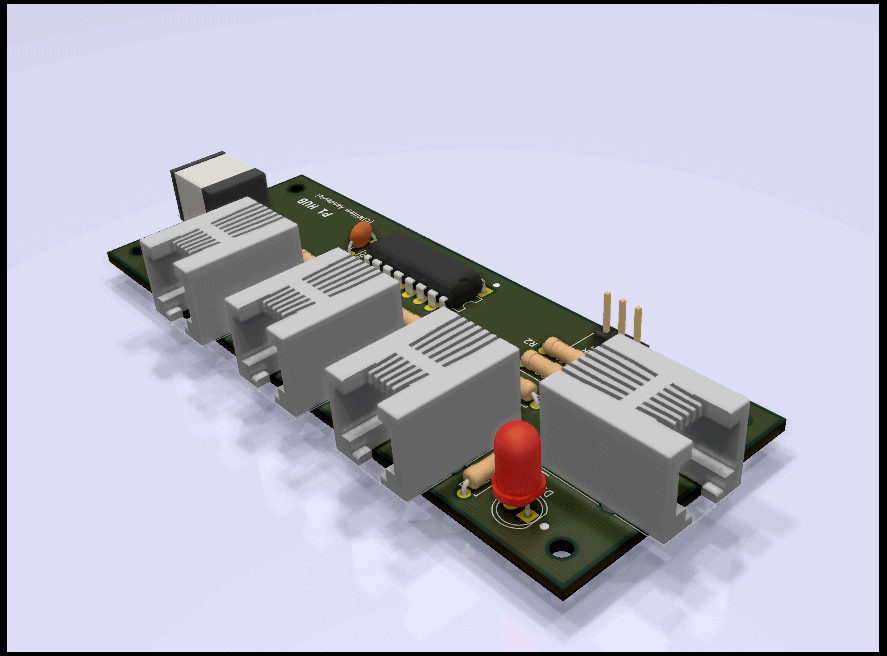
Omdat er steeds meer Slimme meter uitlees kastjes op de markt komen is één P1 poort niet altijd genoeg, maar door de opzet van de P1 poort is het niet zonder meer mogelijk om twee (of meer) uitlees kastjes parallel op de P1 poort aan te sluiten. Deze post beschrijft hoe je dat toch voor elkaar kunt krijgen.
Continue Reading ..
Extending GPIO pins on your Micro Processor
Somehow, no matter what micro processor I choose, I end up with too few GPIO pins for the projects needs or for what I want to do.
To end this run for GPIO pins for once and for all I decided I needed a cheep extension board that could be configured for Switches (input) and LED’s or other stuff (output). And while at it I thought some extra logic would be nice.
Continue Reading ..
ESP8266 ticker
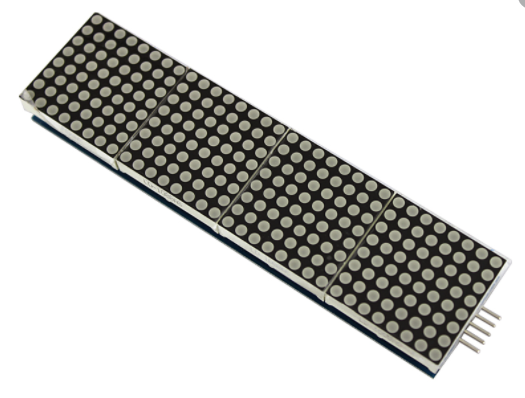
From the moment I saw the MAX7219 Dot matrix modules I wanted to build a news ticker. In addition to the messages to be entered by myself, I want the ticker to display the current weather and news items from the Internet and, of course, the time must also be shown!
Continue Reading
Controlling lots of relays with only two GPIO pins
I recently worked on a project that needed to control a lot of relays. There are these nice boards with 8 or 16 relays that are well suited for my purpose.
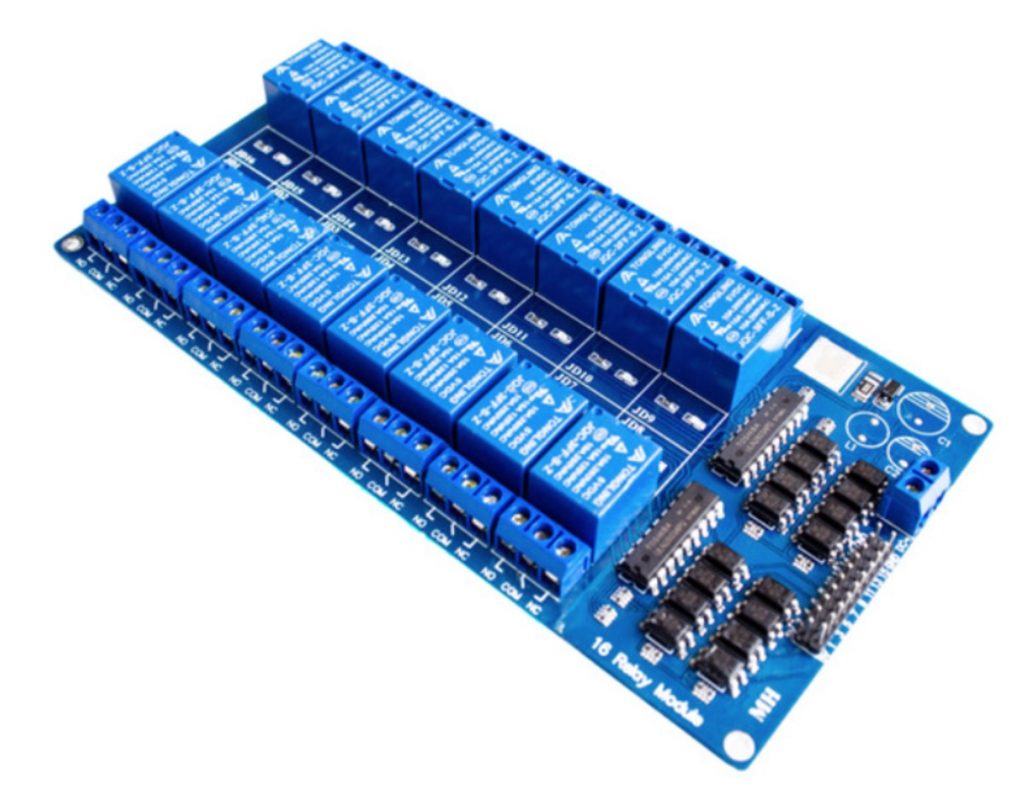
But you need a lot of wires and GPIO pins to control all those relays. So I came up with a piggyback board that uses I2C to control the relays.
You can now control as many of these boards as you like (well, there is a maximum address range of 127 I2C devices, but still 2000 relays with only two GPIO pins .. wauw!) Continue Reading
I2C Rotary Encoder
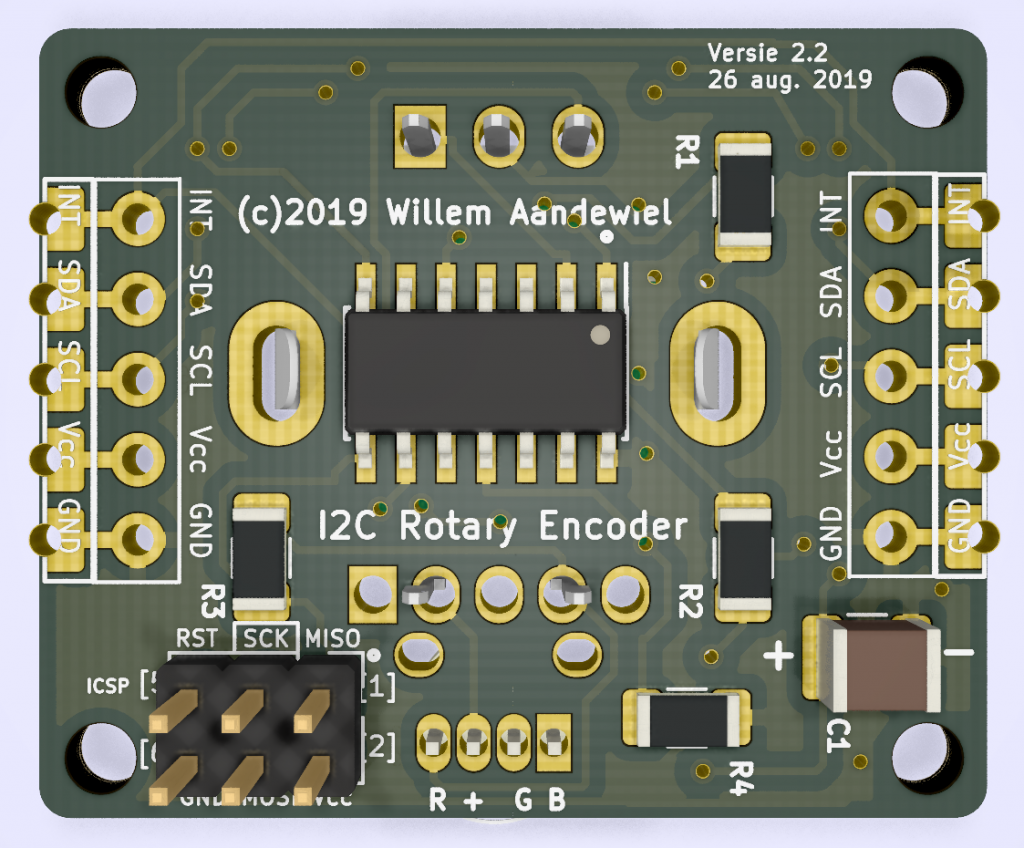
A Rotary Encoder is a device that looks (physically) like a potentiometer but it does not vary the resistance between two/three connectors. Instead it gives pulses when the axle is rotated. Another difference with the potentiometer is that you can rotate the axle over 360° (in fact, there is no limit in how many degrees you can rotate the axle). Continue Reading
Universal InfraRed Learning IoT Remote
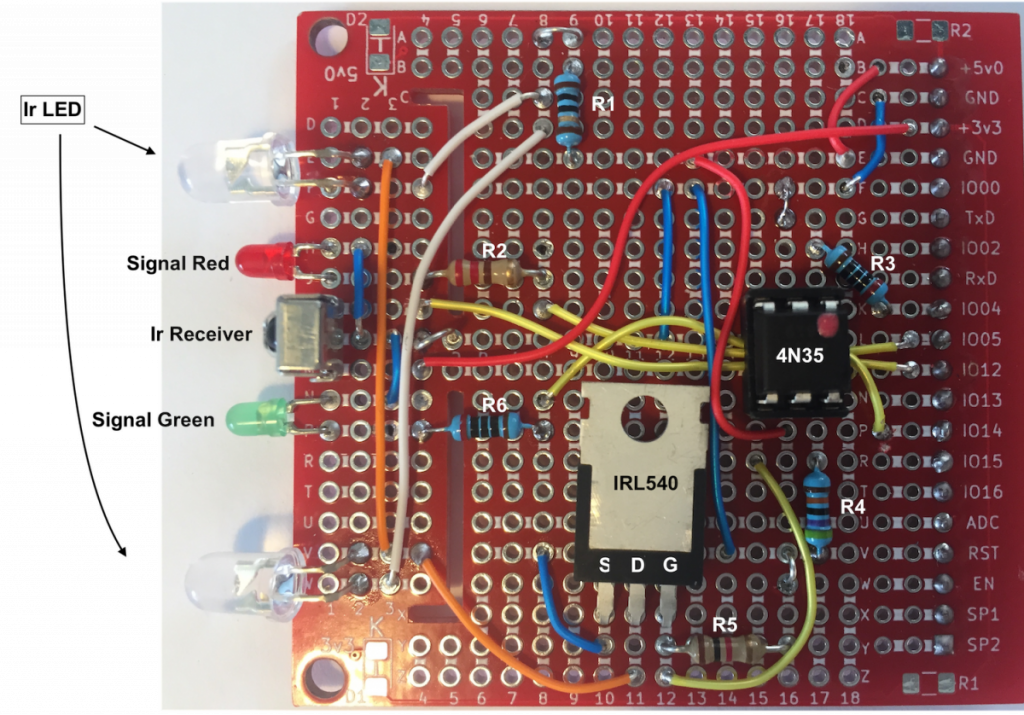
In this post I will guide you through the process of building a device that can capture Infrared-messages from an Infrared remote controller (learning mode), and resend the captured Infrared-messages (sending mode). Continue Reading.
Slimme Meter Uitlezer
Zo langzamerhand zijn alle huizen in Nederland uitgerust met een “Slimme Meter”. Hoog tijd dus om een project te starten om deze Slimme Meter thuis uit te kunnen lezen en de gegevens op een door jouw gewenst formaat te presenteren.
Dit project wordt niet meer actief ontwikkelt. De vervanger is de DSMR-logger32 met de ESP32 processor (zie de post “Crisis? What crisis? (nieuwe Slimme Meter reader)“.
Op 15 juni 2021 is v3.0.1 van de DSMRloggerAPI firmware gereleased!
Deze zgn. “One Fits All” release maakt het overbodig om voor verschillende soorten Slimme Meters (DSMR 2+, 3+, 4+ 5+ en de Belgische varianten hiervan) aangepaste firmware te gebruiken. Alle (mij bekende) Slimme Meters kunnen met deze éne release uitgelezen worden.
> DSMR-logger v4
Aan de hand van de vele reacties van de mensen die het project hebben nagebouwd en mijn eigen ervaring met versie 3 van de DSMR-logger vond ik het tijd worden om een nieuwe versie van de hardware en de firmware te ontwikkelen.
Lees verder.
> Nieuwe firmware voor de DSMR-logger v4
De nieuwe firmware voor de DSMR-logger is “helemaal into” restAPI‘s. Dit is een eenvoudig protocol waarmee gegevens uit de DSMR-logger kunnen worden opgevraagd.
De nieuwe firmware laat het hele idee dat het “alles zelf moet doen” los en laat ingewikkelde- en tijdrovende taken (bijvoorbeeld het opbouwen en tonen van een GUI) aan anderen over. Hierdoor is de firmware compacter en sneller geworden. Uiteraard zorgt de nieuwe firmware wel voor het opbouwen van historische bestanden maar doet dit nu in zgn. RING-bestanden die veel robuuster en sneller zijn dan de sequentiële (PRD) bestanden die in vorige versies van de firmware worden gebruikt. Wat is gebleven is de intergratie met MQTT.
Lees verder.
Aan de slag met de ESP8266
In deze post beschrijf ik hoe je de Arduino IDE voor de populaire ESP8266 processor-bordjes geschikt kunt maken. Hoewel al deze informatie gewoon van internet af te halen is blijkt het voor veel mensen, die de Arduino IDE of de ESP8266 bordjes net ontdekt hebben, overweldigend. Lees verder.
Solid State Tape Device for the (micro) KIM
In 1976 I bought my first computer. That was at a time when there was no internet, there where no PC or Apple’s! Computers where meant for big company’s like insurance compagnies and multi nationals. No one had a computer at home. It was the time of the Homebrew Cmputer Club and Byte magazine. I had a Byte magazine subscription and at a certain point there was an advertisement in it from MOS-Technology for a single board computer called the KIM-1. Continue Reading.
NEW IMPROVED VERSION 2.0! Faster, Better, Nicer! Read all about it.
There is also a 32kb Memory Expansion Board!
BeeHave – a beehive data logger

The objective of this project is to create a device that will measure the temperature inside the beehive at certain intervals, for instance every one, two, three, four or six hours. Continue Reading.
Eenvoudige Programmer voor de ESP-01 (ESP8266)

Om de ESP-01 te kunnen programmeren heb je een programmer nodig. Een andere, goedkope oplossing is, als je al een Arduino hebt, een speciaal programma in een Arduino-UNO te laden en dan met losse draadjes een aantal aansluitingen te maken tussen de Arduino en het ESP-01 bordje.
Het is makkelijker om een “ESP-01 to USB Adapter” te kopen en hier een kleine modificatie op aan te brengen. Lees verder.
 Follow
Follow
Dag Willem,
Ik heb een oude DSMR logger met DSMR-API v2.0.1 (17-04-2020).
Ik wil de logger aansluiten op een ander WiFi netwerk, hoe moet ik dit doen? Hoe kan ik de logger resetten naar factory settings? Ik kan hierover niets vinden.
PS. Ik weet dat er een nieuwe software versie met rest API’s is, maar upgraden lijkt mij niet echt triviaal. misschien kant-en-klare binaries?
Dank,
— Michiel de Vries
Hi Michiel,
Als het ‘oude/bekende’ netwerk niet meer gevonden kan worden dan zal de DSMR-logger automatisch als AP opstarten. Je moet dan met je telefoon, tablet of PC verbinding maken met dit netwerk waarna je de (nieuwe) credentials van je nieuwe netwerk kunt invoeren en opslaan.
Als je nog wel verbinding hebt met je oude netwerk dan kun je inloggen op de telnet-server van de DSMR-loggen (geen user-name of password) waarna je de opgeslagen credentials kunt erasen (één van de menu keuzen). Ook dan zal de DSMR-logger bij een restart zichzelf als AP presenteren.
Ik heb met https://flasher.aandewiel.nl/ een begin gemaakt met het aanbieden van binaries. Ik weet eigenlijk niet of de DSMPloggerAPI daar ook al op staat..
Dank. Duidelijk.
Hallo Willem, vanaf 2020 heb ik je fantastische dsmr-api slimme meter uitlezer in gebruik. Echter vanaf 17-07-2025 krijg ik regelmatig dat mijn gas per uur een uur overslaat en weer opnieuw met de totale stand van het gas verbruik begint.
Wat me opvalt dat dit altijd gepaard gaat met een herstart van de dsmr-api. Ik zie opdat moment in de systeem info dat de uptime b.v. 0(d)-01:34(H:m) is en dat de laatste reset reden Power On is. Ik heb via telnet de Reboot gedaan en dit geeft als laatste reset reden Software System Restart. Ik heb de rj connector los gehaald en weer terug geplaatst dit geeft als laatste reset External System. Maar wat nu de power on reden is weet ik niet en kan ik op internet ook niet vinden. Weet jij misschien waar ik het moet zoeken? in de dsmr-api zelf misschien??
Hieronder de weergave van het gas verbruik per uur.
(31) [13:00 – 13:59] 0 68 0.000
(31) [12:00 – 12:59] 26 283 0.017
(31) [11:00 – 11:59] 0 266 3586.702
(31) [10:00 – 10:59] 0 312 –
(31) [09:00 – 09:59] 27 140 0.000
(31) [08:00 – 08:59] 53 10 0.031
(31) [07:00 – 07:59] 76 12 0.055
(31) [06:00 – 06:59] 117 0 0.018
(31) [05:00 – 05:59] 93 0 0.000
(31) [04:00 – 04:59] 106 0 0.017
(31) [03:00 – 03:59] 92 0 0.000
(31) [02:00 – 02:59] 95 0 0.017
(31) [01:00 – 01:59] 109 0 0.000
(31) [00:00 – 00:59] 100 0 0.016
(30) [23:00 – 23:59] 94 0 0.000
(30) [22:00 – 22:59] 173 0 0.014
(30) [21:00 – 21:59] 171 0 0.020
(30) [20:00 – 20:59] 94 4 0.000
(30) [19:00 – 19:59] 3 382 0.016
(30) [18:00 – 18:59] 0 1725 0.000
(30) [17:00 – 17:59] 0 1847 0.017
(30) [16:00 – 16:59] 0 1813 0.000
(30) [15:00 – 15:59] 0 1439 0.017
(30) [14:00 – 14:59] 0 1412 0.000
(30) [13:00 – 13:59] 0 1054 0.017
(30) [12:00 – 12:59] 0 649 0.000
(30) [11:00 – 11:59] 0 474 0.016
(30) [10:00 – 10:59] 0 328 0.000
(30) [09:00 – 09:59] 14 137 0.016
(30) [08:00 – 08:59] 33 70 0.000
(30) [07:00 – 07:59] 22 12 0.042
(30) [06:00 – 06:59] 129 0 0.017
(30) [05:00 – 05:59] 90 0 0.000
(30) [04:00 – 04:59] 101 0 0.017
(30) [03:00 – 03:59] 98 0 0.000
(30) [02:00 – 02:59] 95 0 0.017
(30) [01:00 – 01:59] 110 0 0.000
(30) [00:00 – 00:59] 106 0 0.016
(29) [23:00 – 23:59] 83 0 3586.292
(29) [22:00 – 22:59] 178 0 –
(29) [21:00 – 21:59] 140 0 0.006
(29) [20:00 – 20:59] 81 0 0.014
(29) [19:00 – 19:59] 1 320 0.097
(29) [18:00 – 18:59] 195 1032 0.047
(29) [17:00 – 17:59] 408 487 0.008
(29) [16:00 – 16:59] 342 709 0.017
(29) [15:00 – 15:59] 3 1075 0.000
(29) [14:00 – 14:59] 52 714 0.015
en gegevens uit systeem info
Firmware Versie v3.0.4 (14-10-2022)
Up Time [dagen] – [hh:mm] 0(d)-02:19(H:m)
Up Time in Seconds 8394 sec
Laatste Reset reden Power On
Ik zie dan ook in de router dat de dsmr-api opnieuw verbinding maakt met Wifi.
Hopelijk kun jij mij wat wijzer maken.
Bij voorbaat alvast bedankt
Hallo Rom,
Wat een vreemde situatie.
Heb je dit probleem alleen met het gas verbruik of ook met het elektriciteit verbruik?
Wat de DSMR-logger firmware doet is één keer per uur de meterstanden vastleggen. Het verbruik berekend hij dan door de vorige waarde van de nieuwe waarde af te trekken.
Wat ik zie is dat de 29e tussen 23:00 en 00:00 een meterstand wordt opgeslagen van 3586.292m3
Op de 31e tussen 11:00 en 12:00 wordt er een meterstand opgeslagen van 3586.702m3
Er wordt dus gas verbruikt én opgeslagen, maar dit zou veel vaker moeten gebeuren.
Een “Software Reset” wil zeggen dat de firmware besloten heeft om de DSMR-logger opnieuw op te starten. Dit kan gebeuren als er over een langere tijd geen (geldige) telegrammen zijn gelezen.
Ik denk dat dit bij jou ook het geval is, maar dan zouden ook de elektriciteit verbruik soort gelijke problemen moeten geven.
Controleer of ue een stabiele voeding hebt en of er geen probleem is met het kabeltje tussen de Slimme Meter en de DSMR-logger.
Hoi Willem, bedankt voor je reactie.
Het gas verbruik word ook per uur doorgegeven, zoals ook de elektra en de teruglevering zie tabel. Ik had er al een externe voeding aangesloten van 300W, maar dit gaf hetzelfde resultaat. Ik heb de kabel met een kabeltester getest en dit gaf aan dat de kabel in orde is. ik vraag me dus af wat Power On bij de status van de laatste reset reden betekend. wat me ook opvalt is dat als het gebeurd dat er 36 uur tussen zit bij de volgende Power On zie figuur 1. Als ik met homeassistant kijk zie ik dat op het moment dat de waarde van gas naar 0 gaat zowel bij teruglevering elektra als gebruik elektra 42 seconden van te voren een afvlakking van de waarde. Op het moment dat het gas 0 word is er bij teruglevering – en gebruik elektra een daling te zien en lijkt het bij teruglevering – en gebruik elektra weer normaal terwijl de gas nog op 0 blijft. zie figuur Schermafdruk van 2025-08-01 12-20-42.png.
Blijft voor mij nog tevens de vraag of jij ook weet wat Power On bij de laatste Reset reden betekent.
Hierbij figuur 1
De entiteit “Power On” geeft aan hoe of waarom de DSMR-logger de laatste keer gereset is.
Als daar “Software System Restart” dan heeft de firmware besloten dat het tijd is om de DSMR-logger te resetten.
Dat kan dus als er niet genoeg telegrammen binnen komen binnen een bepaalde tijd of als er heap problemen zijn.
Nu is het zo dat de meeste Slimme Meters niet iedere paar seconden of minuten informatie van de GasMeter krijgen (Via de MBus).
Maar in die gevallen zou de DSMR-logger wel steeds de oude meterstand moeten doorgeven (het verbruik is dan 0m3).
Als je een schermafdruk (geen foto) van de DSMR-logger GUI kunt maken over [Per Uur], [Per Dag], [all Fields] en een volledig telegram dan kan ik daar misschien iets uit afleiden. Wat er in HA gebeurd kan ik niets over zeggen omdat ik dat niet ken (al jaren niet meer gebruik). Wel weet ik dat HA regelmatig zijn interface en YAML structuren aanpast. Heb je sinds de problemen iets aan HA geupdate?
per uur
Rom,
Wat ik zie is dat er iets behoorlijk mis is met je Uren Tabel (DSMRhours.csv – meen ik).
Daarin is de date informatie van de bovenste regel 6 t/m 10 niet correct. Dan zal ook de informatie die berekend wordt niet kloppen.
Vermoedelijk zal dit over 48 uur recht getrokken zijn.
Verder zie ik geen gekke dingen (behalve dat de plaatjes ERG GROOT zijn..
per dag
all fields
telegram.
Willem wat me wel te binnen schoot is dat ik een tijdje geleden de MQTT van 30 seconden naar 10 seconden heb gezet. Ik weet niet of dit de oorzaak zou kunnen zijn. Maar dan snap ik de 36 uur tussen de voorvallen niet.
Bij mij valt de WiFi nog al eens weg. Als ik dan reboot krijg ik de nieuwste meterstand en het verbruik sinds de laatste meten; dit kan over dagen zijn. Nooit gekeken of het redelijk is.
Omdat de DSMR-logger alleen meterstanden registreert ‘klopt’ het uiteindelijk altijd. Ook als je meerdere metingen (uren/dagen/weken of maanden) mist. Alleen worden je grafieken een beetje vreemd.
Hi Willem,
Ik ben erg onder de indruk van jouw vaardigheden in het ontwikkelen van een P1-meter. Het lijkt me leuk om met je in contact te komen en jouw producten eens uit te testen.
Ik hoor graag van je!
Met vriendelijke groet,
Dennis,
Ik stuur je een PM.
Can you contact me to discuss your P1 devices. thanks
Hi Richard,
I send you a PM
Ok. You have my email? Thanks
Yes!
Beste Willem,
Ik kom graag in contact met je voor het ontwikkelingen van een P1 poort tester. Helaas zijn deze niet verkrijgbaar waardoor wij momenteel vast lopen.
Gezien jou blog kunnen wellicht iets duurzaams ontwikkelen tegen fair prijs voor installatiepartijen.
Mecit, ik stuur je een PM!
Geachte heer Aandewiel, Beste Willem
Ter info:
Ik heb de DSMR logger zonder problemen werkend op een XS210 ESMR5 slimme meter.
Zie de bijlage.
Met vriendelijke groet,
Manuel van Amerongen
Dag Willem,
Een vriend wees me op deze site omdat ik uitleesunits maak voor de groepsmeter van GPX. Misschien is het aardig wat uit te wisselen. We werken uitsluitend open source, en GPX is non-profit. Demo groepsmeter.
Zie ook Github
Ben benieuwd.
Mvg, Egbert Bouwhuis, Arnhem
Hallo Egbert,
Wat een mooi project!
Ik stuur je een PM
Dag Willem,
Ik kom bij toeval op deze site terecht en heb een probleempje.
Al mijn afstandsbedieningen zijn geprogrammeerd in een universele van het type Logitech. Deze A.B. kan ook opdrachten leren.
Van álle apparaten lukt dit maar niet van de Horizon Next Box van Ziggo.
Het blijkt, dat dit apparaat aangestuurd wordt met een ander signaal dan InfraRood maar wél draadloos.
Ik heb ook de mogelijkheid om een RAW opdracht te leren maar wat is dat ?
Heb je enig idee hoe dit moet worden opgelost?
Bij voorbaat dank.
Frans Habets
Volgens mij werkt de Ziggo box met bluetooth en/of WiFi.
hallo misschien een vreemde vraag voor u ik doe in ijsmachines de aandrijving geschied door een elektromotor om het ijs van een cilinder af te schrapen de koude hiervoor word geleverd door een compressor .deze word in en uitgeschakeld door een micro schakelaar op de aandrijfriem middels een trekveren stelsel van elektromotor .werkt op trekkracht deze zijn complex en moeilijk in te stellen en nooit constant mijn vraag is het mogelijk om met een sensor op de as van de motor het toeren tal te meten en deze bij een verlaagt toerental te laten schakelen bv de motor maat onbelast 1200 rpm bij een trekkacht met bv 900 rpm moed hij schakelen zodat de koelmotor uitschakeld en weer een oplopend toerental bv 900 rpm weer inschakeld dez diff moed instelbaar zijn de motoren zijn 1,5 pk en worden met 380volt geschakeld dmv vermogens relais met een spoelspanning van 220 volt als u verder info wilt kan ik wat info toesturen dat het wat duidelijker word of telefoneren bvd gerard vermeulen
Gerard,
Wat jij wil is zeker mogelijk.
Ik stuur je een PM met wat vragen voor aanvullende informatie (foto’s, schema’s enz.)
Beste Willem,
Ik kom u net tegen op internet. Misschien kunt u mij helpen met het volgende;
Ik heb een floww kokend water kraan. Daar zit wsl. een rotary encoder in met een RGB led. Er zit een USB kabel (grote usb) aan de kraan. Deze werkt met een HUB (400,-), die ik niet heb en te prijzig vindt.
Weet u hoe ik de kraan werkend kan krijgen met eenvoudige electronica?
Het is voldoende als ik een paar kleppen kan aansturen voor kokend water. Kunt u wellicht e.e.a. samenstellen en tegen welke kosten?
Ik hoor graag van u.
Met vriendelijke groet,
Marco
Toffe projecten Willem !Je bent een topper!
Keep on the good work.
Misschien is het ook eens interessant om een smart smoke detector projectje op te zetten met een esp8266 ? Dit zou ik in elk geval ook heel erg interessant vinden.
Mvg Tino
Hi Tino,
Bedankt voor het compliment.
Over je voorstel ga ik zéker nadenken.