
This post has 4,380 keer bekeken / views
In 2020 kreeg een vriend van mij (Jelmer de Jong) het verzoek van een Afval Container Bouwer uit Friesland om voor hen een systeem te ontwikkelen waarmee zwerfafval rond ondergrondse afvalcontainers kan worden gedetecteerd en (electronisch) gemeld.

Jelmer vroeg mij of ik mee wilde werken aan dit project. Omdat we al vaker samen aan projecten hebben gewerkt en omdat dat altijd leuk en leerzaam is, heb ik natuurlijk ingestemd!
Uiteindelijk is het één van de grootste projecten geworden waar ik de afgelopen jaren aan heb gewerkt. Zowel qua doorlooptijd als ook qua kosten.
Globaal bestaat het project uit drie delen.
- Het bestaande Container Management Systeem van de opdrachtgever
- De bestaande Controller (met GSM connectivity) van de opdrachtgever
- Het (door ons te ontwikkelen) Detectie Systeem
Functionele Eisen
Het Detectie Systeem krijgt periodiek opdracht van de Controller om te “kijken” of er afval bij de container is bijgezet. Zo “ja” dan geeft hij dat door aan de Controller die het, via het GSM netwerk over internet doorgeeft aan het Container Management Systeem (CMS) van de containerbouwer (opdrachtgever).
Technische Eisen
In iedere container zit een accu die de energie voor de trommelmotor en de Controller (met kaartlezer) verzorgt. Vaak heeft de container ook een zonnepaneel om de energievoorraad van de accu aan te vullen. Maar het mag duidelijk zijn dat het energie verbruik, om het Detectie Systeem te laten werken, minimaal moet zijn.
De communicatie tussen de Controller en de Detectie Module loopt via een RS485 bus.
Op zich dus redelijk overzichtelijk.
Afgesproken wordt dat de al in de containers aanwezige Controller van de opdrachtgever, die ook al gebruikt wordt voor communicatie met het bestaande CMS, door de opdrachtgever geschikt wordt gemaakt voor onze Detectie Module en dat de Detectie Module de Controller van de opdrachtgever zal gebruiken voor het doorgeven van de status van de sensoren. Wij kunnen ons dan volledig concentreren op het afvaldetectie systeem.
Uiteraard hebben we alle functionele- en technische-eisen plus alle deliverables, go-no-go momenten, risico’s, randvoorwaarden en kosten in een projectplan vastgelegd.
Sensor Selectie
Om te beginnen moesten we uitzoeken welke typen sensoren geschikt zijn om betrouwbaar objecten in de nabijheid van een afvalcontainer te detecteren.
Lidar
Een eerste type sensor dat we probeerden waren Lidar sensoren. Deze detecteren door middel van een laserreflectie óf er een object in zicht ligt en hoe ver (of dichtbij) dat object zich van de afvalcontainer bevindt.
De tests met Lidar waren hoopgevend, maar Lidar blijkt in (fel) zonlicht minder betrouwbaar te werken omdat de zon ook licht in het spectrum van Lidar uitzendt en zodoende de werking nadelig beïnvloedt. Ook de beperkte spreiding van de lichtbundel maakt Lidar ongeschikt voor ons doel.
Radar
Als tweede sensor type hebben we RaDAR (Radio Detectie And Ranging) sensoren getest. Uit onze tests bleek dat deze sensoren wel heel gevoelig zijn voor het detecteren van beweging maar ze verliezen stationaire objecten al snel uit het oog. Daarbij komt dat de volledig uit metaal bestaande afvalcontainers de werking van de sensoren nadelig beïnvloedt.
Camera
De mogelijkheid om gebruik te maken van camera’s en AI wordt door een potentiële klant (Omrin) verworpen vanwege privacy wetgeving.
Ultrasoon
Het vierde type sensor waar we mee zijn gaan testen waren Ultrasone sensoren. De ultrasone sensoren bestaan, globaal, uit twee uitvoeringen.
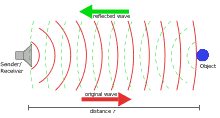
De eerste variant maakt gebruik van een zogenaamde transducer die zowel als luidspreker (zender) als ook als microfoon (ontvanger) werkt.

De tweede variant maakt gebruik van een aparte luidspreker (zender) en microfoon (ontvanger).
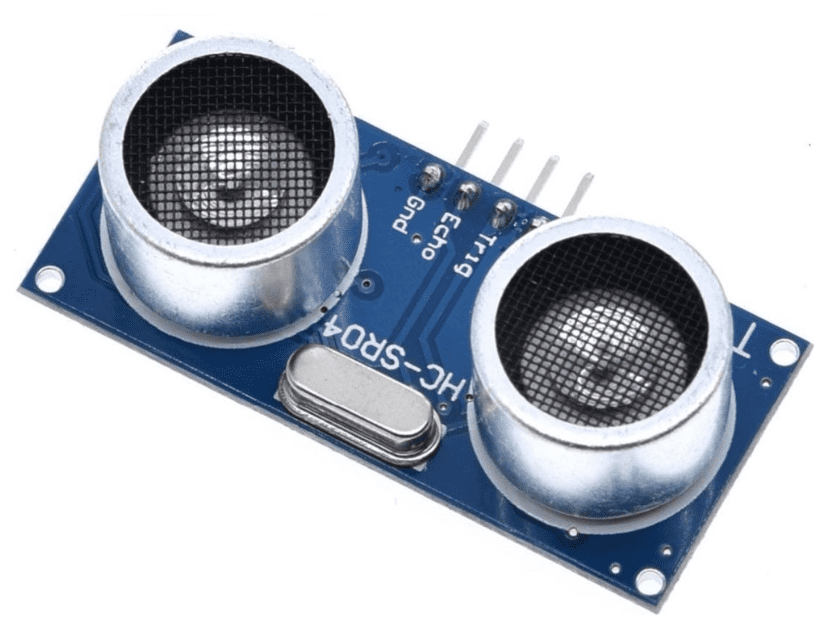
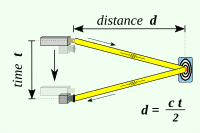
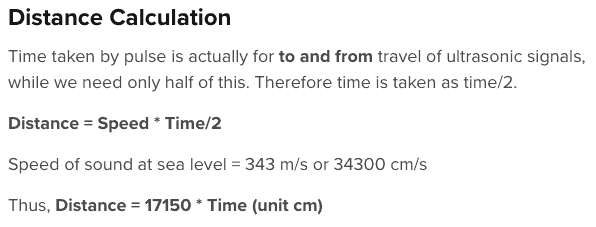
Door middel van een complexe elektronische schakeling wordt geschakeld tussen het zenden en het ontvangen. Het verzonden signaal wordt weerkaatst door objecten die in de line of sight van de zender staan en opgevangen worden door de microfoon. Met behulp van de tijd die verstrijkt tussen het zenden en ontvangen én de snelheid van het geluid in lucht kan de afstand tussen de sensor en het object worden berekend.
Uit tests bleek dat dit type sensor, mits een waterdichte uitvoering wordt gebruikt, uitermate geschikt is om betrouwbaar zwerfafval rond de afvalcontainer te kunnen detecteren.
Om bovenstaande reden hebben we met dit type sensoren een ontwerp gemaakt dat voldeed aan alle door de opdrachtgever gestelde eisen.
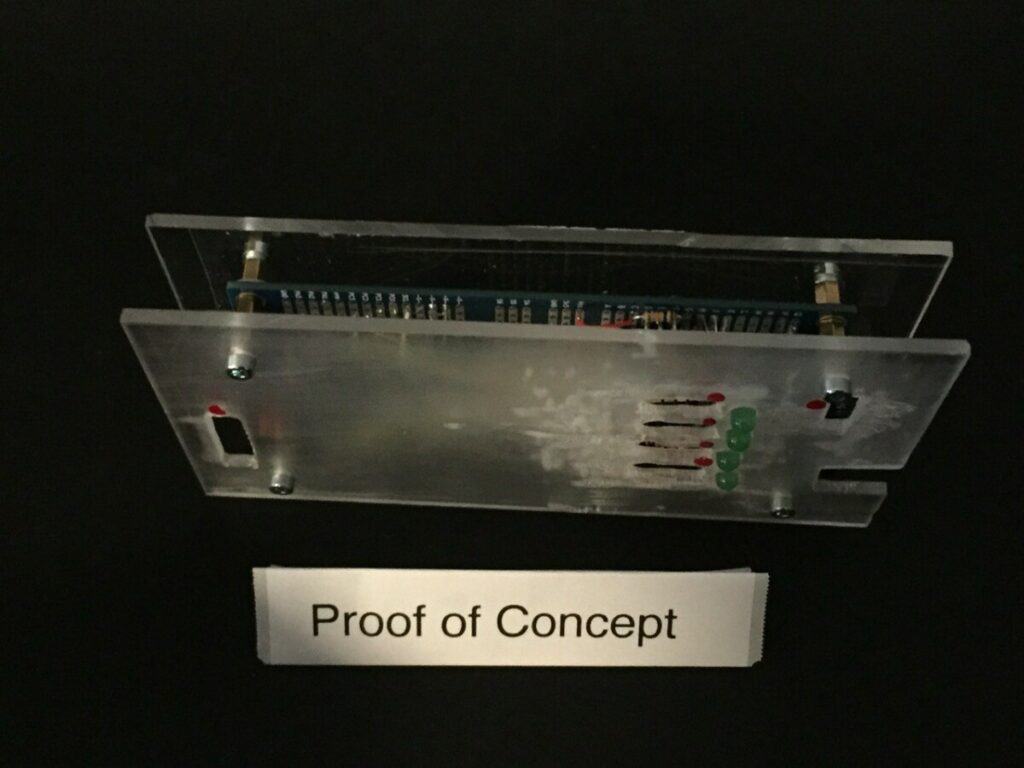
We hebben een dummy “container” gemaakt met, conform ons projectplan, ons prototype Detectie Module om het proof of concept aan de opdrachtgever te demonstreren die de opdrachtgever vervolgens aan Omrin kan demonstreren.
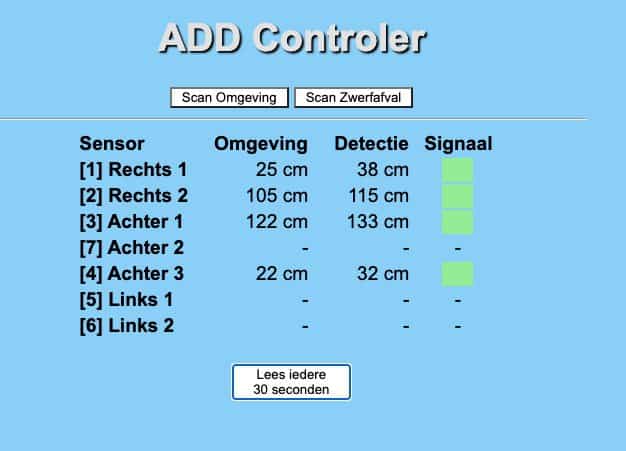
Waarschijnlijk omdat de opdrachtgever nog geen tijd heeft gehad om zijn CMS geschikt te maken voor onze Detectie Module, worden de functionele- en technische-eisen op het laatste moment aangepast en moeten we in korte tijd óók een systeem ontwikkelen waarmee we “stand alone” de detectie én het signaleren op een telefoon (via WiFi) kunnen demonstreren.
Na de geslaagde demonstratie van ons “proof of concept“ blijkt dat de opdrachtgever helemaal geen “opdrachtgever” wil zijn maar dat, in tegenstelling tot eerdere afspraken, eMails en toezeggingen, van ons wordt verwacht dat wij de ontwikkeling uit eigen zak betalen.
Mocht het systeem goed werken dan zullen wij immers meeliften met het succes van de containerbouwer, want er staan in Nederland globaal 80.000 afvalcontainers en alle Gemeenten in Nederland (en daar buiten) zijn op zoek naar zo’n zwerfafval detectie systeem…
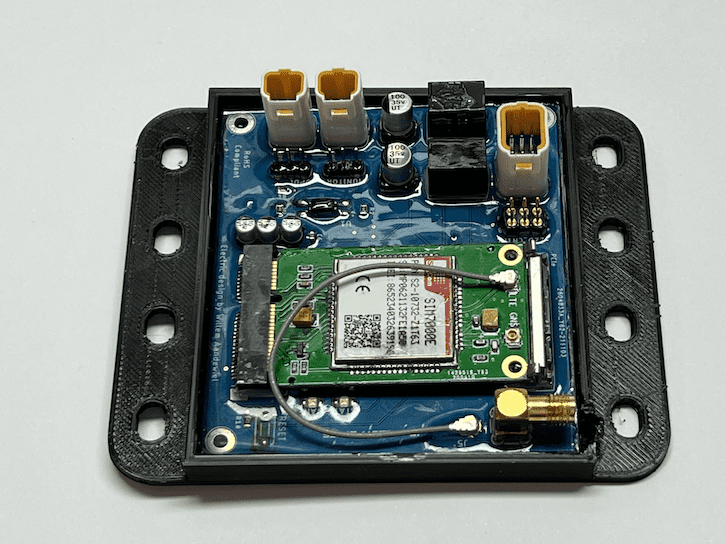
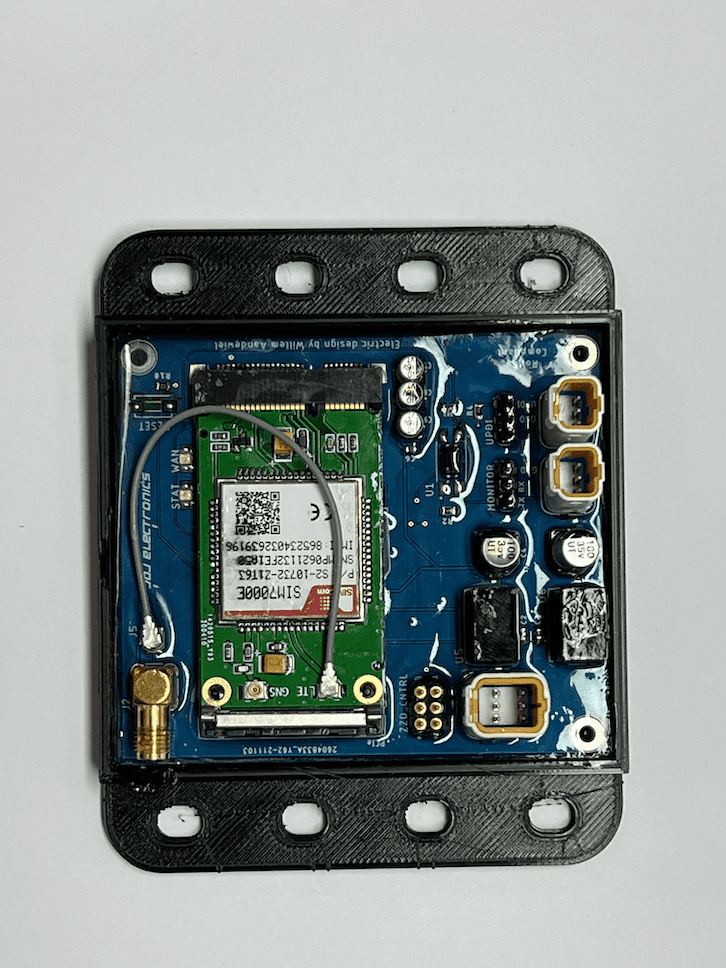
Na intern beraad hebben Jelmer en ik besloten om inderdaad, voor eigen rekening, het systeem verder te ontwikkelen. Om het systeem algemener te maken hebben we wel besloten om naast de Zwerfafval Detectie Module óók een eigen GSM Communicatie Module, een Portal op een Externe Server (gehost bij AWS) én een telefoon app die van de Externe Server meldingen krijgt zodra er naast een container afval wordt neergezet, te ontwikkelen.
Met de containerbouwer hebben we afgesproken dat hij, zodra we een werkend systeem kunnen leveren, een factuur zal ontvangen voor het verkrijgen van één unit die hij bij zijn klant (Omrin) kan plaatsen en vervolgens nog een factuur voor een tweede unit waarmee onze gemaakte kosten, min-of-meer, worden gedekt.
De Oplossing
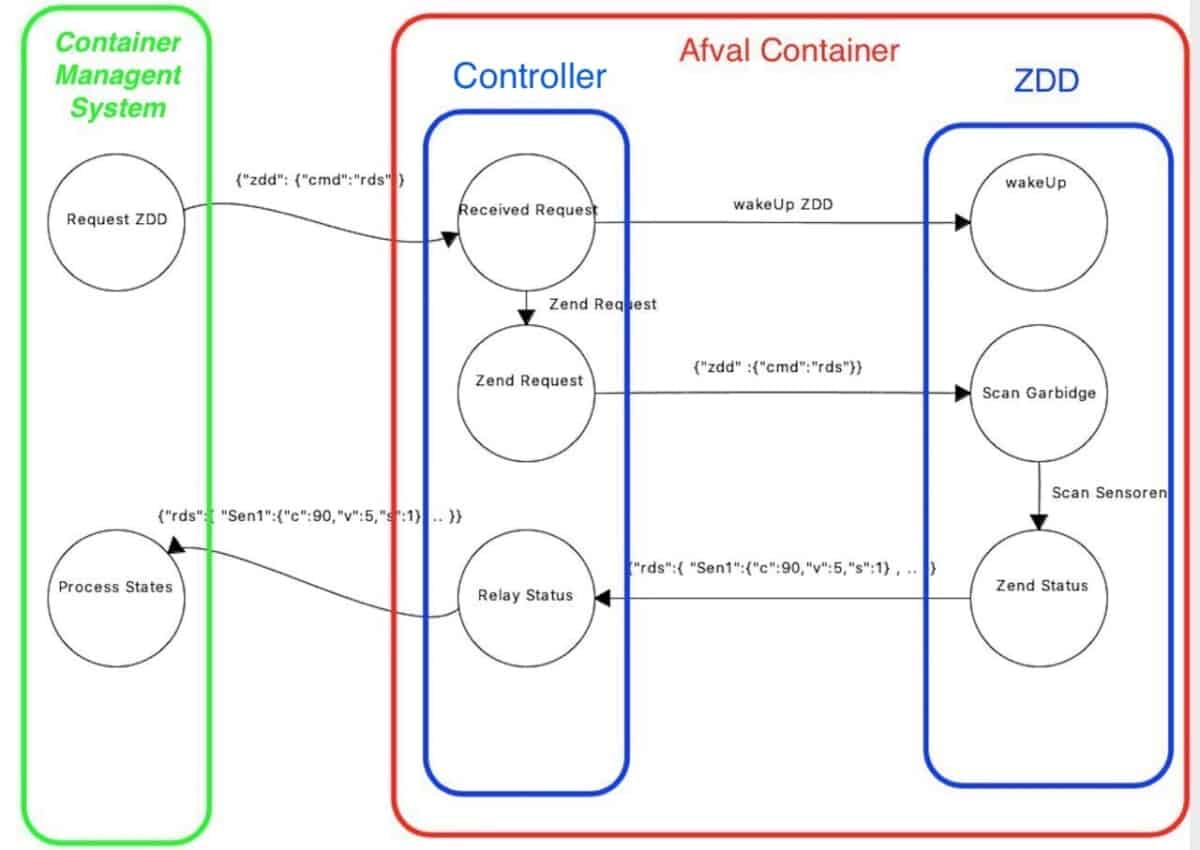
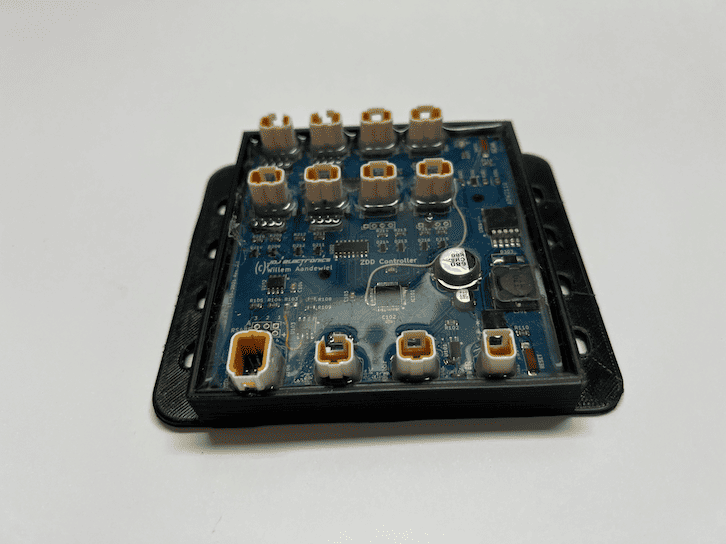
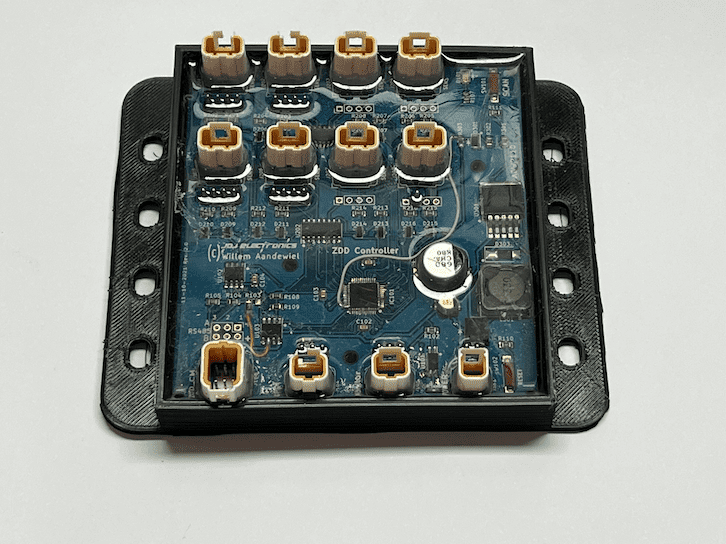
Om energie te besparen worden de sensoren alleen van spanning voorzien als ze ook daadwerkelijk een meting moeten doen. Daarvoor worden de sensoren ieder gevoed vanuit een eigen High-Side switch. Om zogenaamde “false positives” te voorkomen wordt een detectie pas gemeld als deze in twee achtereenvolgende cycli aanwezig is. De Micro Controller wordt periodiek wakker uit deep-sleep, leest één voor één alle sensoren uit, analyseert de nieuwe en oude situatie, meldt de status eventueel aan de Communicatie Module en gaat weer slapen.
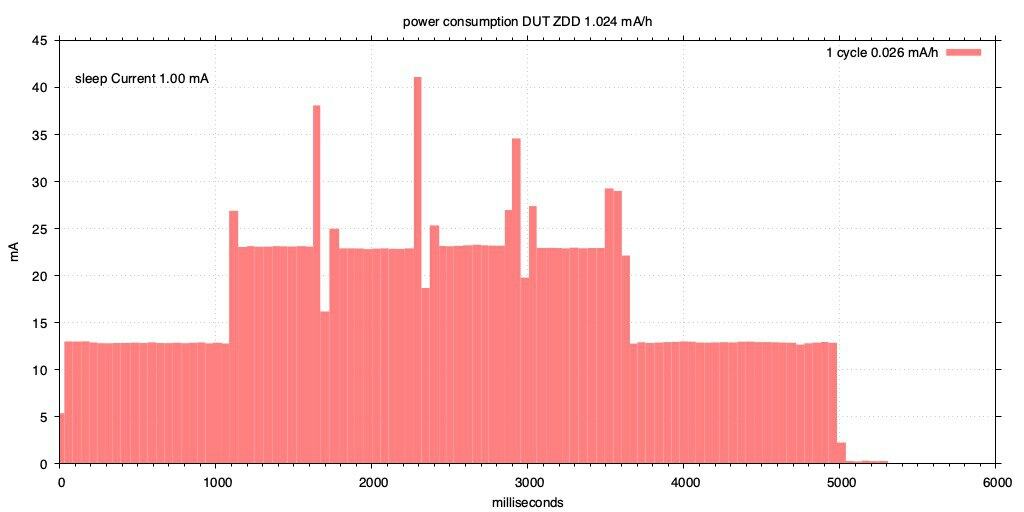
Eén keer per uur (zodat het Portal “weet” dat de container nog actief is) óf als de status zodanig is veranderd dat deze aan het Portal moet worden gemeld, wordt de Communicatie Module wakker gemaakt en wordt een JSON bericht met status informatie naar het Portal gestuurd. Hierdoor kan het energieverbruik tot een minimum worden beperkt (zie bovenstaande afbeelding).
{
"ID":253706,
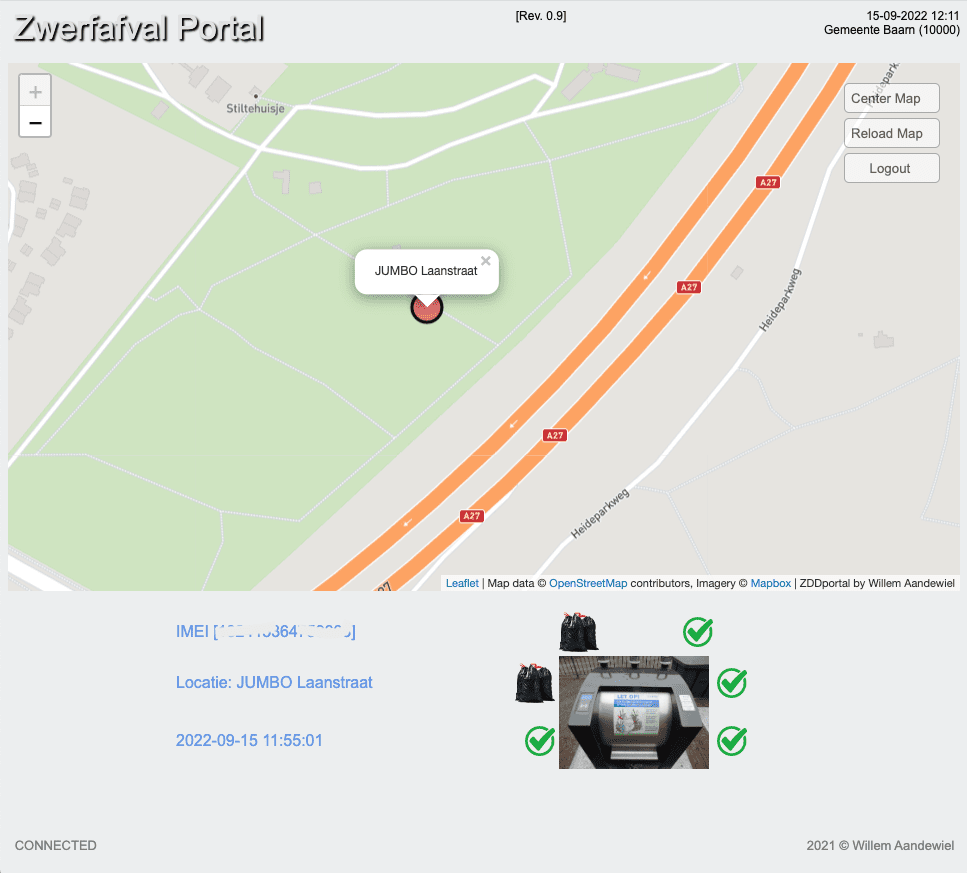
"Name":"AH Midstraat",
"Lv":72,"La":80,"Al":76,"Ar":999,"Ra":999,"Rv":999,
"Vbat":"10.9","pwr":"21.70",
"nrScans":21356,
"ts":"2022-04-23 17:49:55"
}In het JSON bericht staan achtereenvolgend:
- Het unieke ID van de Communicatie Module
- De Naam (omschrijving) van deze container
- De gemeten afstand tussen de verschillende sensoren en een object
- De accu spanning van de container
- Het verbruik in mA/h (deze wordt sterk beïnvloed door het aantal scans per uur)
- Het aantal door de Detectie Module uitgevoerde scans
- De datum en tijd van de laatste scan
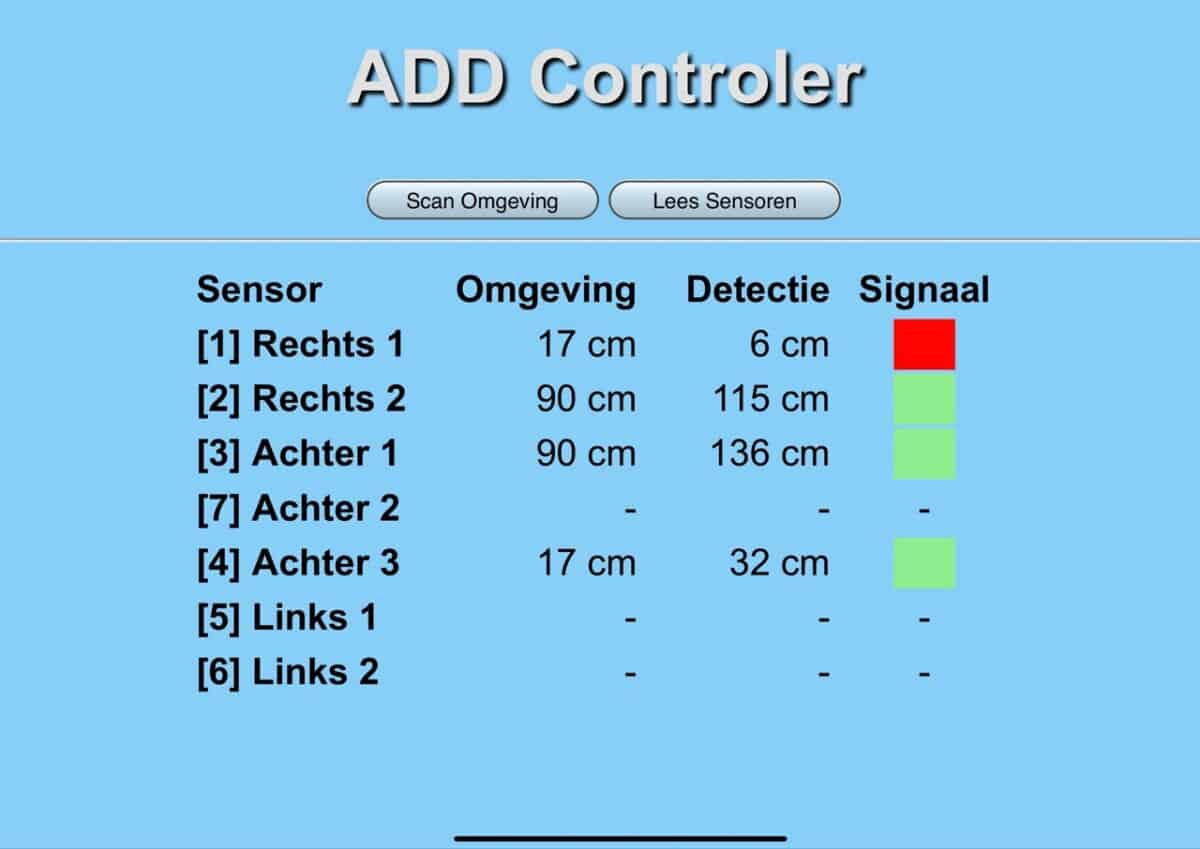
Na het ontvangen van het JSON bericht zal de server een JSON bericht naar de Communicatie Module sturen met daarin de gewenste interval en per sensor hoe ver hij moet “kijken” om vast te stellen dat er een object in zijn zicht is bijgezet (soms staat er bijvoorbeeld een lantarenpaal of muurtje dichtbij de container. In dat geval wil je dat de sensor alleen kijkt tot vlak voor die lantarenpaal of dat muurtje en deze objecten niet als bijzet meldt).
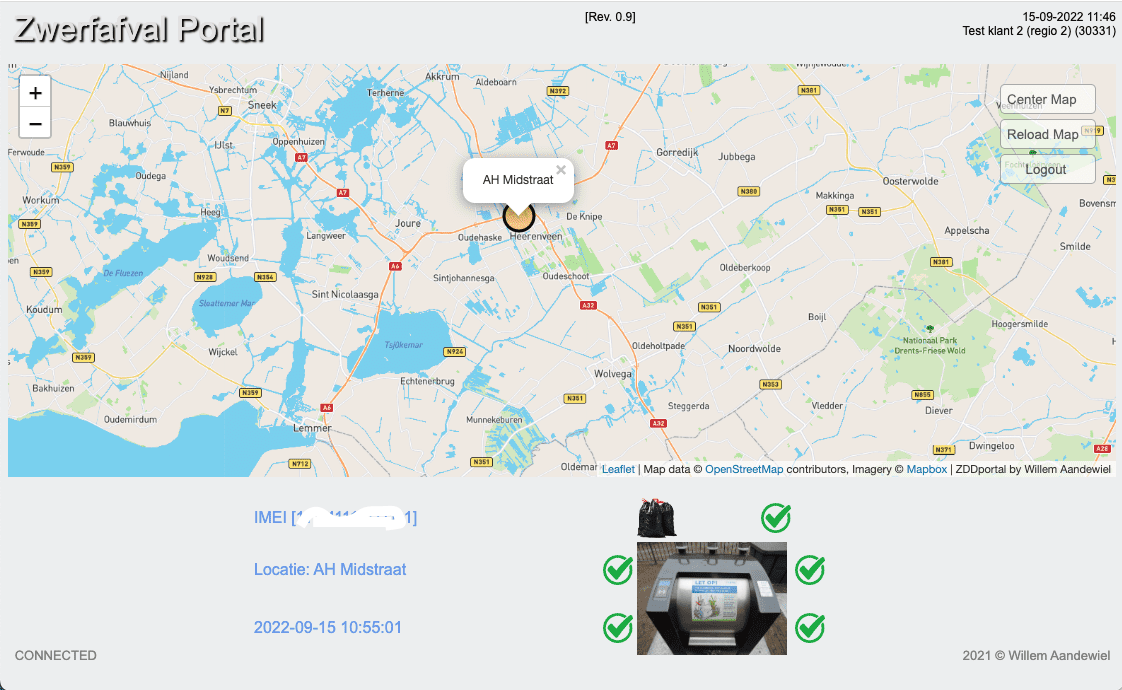
In maart 2022 is Omrin een proef gestart met ons detectie systeem.

Helaas hebben we daarna niets meer van de containerbouwer gehoord. Hij heeft de factuur voor één systeem betaald, maar dat was op geen stukken na voldoende om de door ons gemaakte, kosten te compenseren (om nog maar te zwijgen over de geïnvesteerde tijd).
In juni 2022 hebben we ons systeem (Detectie Module en Communicatie Module) uit de demonstratiecontainer van Omrin verwijderd.
Al met al was het een leerzaam en technisch uitdagend project.
Jammer dat het op niets is uitgelopen.
 Follow
Follow